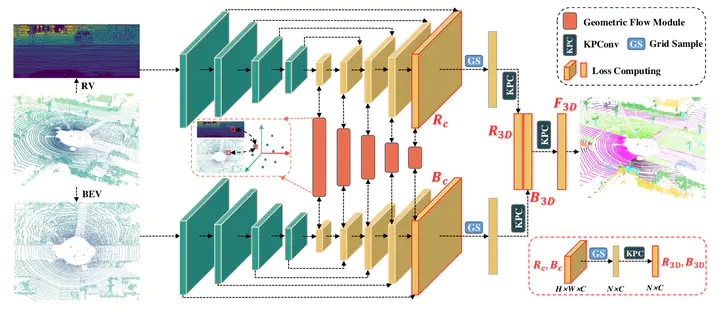
 Overall pipeline
Overall pipelineAbstract
Point cloud semantic segmentation from projected views, such as range-view (RV) and bird’s-eye-view (BEV), has been intensively investigated. Different views capture different information of point clouds and thus are complementary to each other. However, recent projection-based methods for point cloud semantic segmentation usually utilize a vanilla late fusion strategy for the predictions of different views, failing to explore the complementary information from a geometric perspective during the representation learning. In this paper, we introduce a geometric flow network (GFNet) to explore the geometric correspondence between different views in an align-before-fuse manner. Specifically, we devise a novel geometric flow module (GFM) to bidirectionally align and propagate the complementary information across different views according to geometric relationships under the end-to-end learning scheme. We perform extensive experiments on two widely used benchmark datasets, SemanticKITTI and nuScenes, to demonstrate the effectiveness of our GFNet for project-based point cloud semantic segmentation. Concretely, GFNet not only significantly boosts the performance of each individual view but also achieves state-of-the-art results over all existing projection-based models.